
 Zhengping Ji
Zhengping Ji
1 Backgrounds
The finite-valued networks are important models in complex system engineering. These systems are characterized as multi-agent dynamics with nodes taking values in finite sets endowed with operators. The study of finite-valued functions and systems can be traced back to finite automata [6], encryption-decryption in cryptography [1], and Boolean networks in theoretical biology [3].
In the analysis and design of finite-valued networks, the commonly used methods consists of symbolic approach and the algebraic state-space representation (ASSR). The former is not easy for deriving uniform expression while the latter suffers from high computational complexity [2].
In our work, we present an aggregation method for the ASSR based on bisimulation, to reduce the model dimensionality.
2 Problem Formulation
A k-valued control network is a multi-agent system of n nodes evolving over a finite-valued set {\cal D}_k:=\{1,\cdots,k\}:
\begin{array}{l} x_i(t+1)=f_i(x_1(t),\cdots,x_n(t), u_1(t),\cdots,u_m(t)), \quad i=1,\cdots,n,\\ y_j(t)=h_j(x_1(t),\cdots,x_n(t)),\quad j=1,\cdots,p, \qquad (2.1) \end{array}
where x_i(t)\in {\cal D}_k, i=1,\ldots,n are states, u_s(t)\in {\cal D}_k, s=1,\ldots,m are inputs (or controls),
y_j(t)\in {\cal D}_k, j=1,\ldots,p are outputs (or observations), f_i:{\cal D}_k^n\times {\cal D}_k^m \rarr {\cal D}_k, i=1,\ldots,n are state updating functions, h_j:{\cal D}_k^n \rarr {\cal D}_k, j=1,\ldots,p are output functions.
By identifying i as a logical vector (0,\cdots,0,1,0,\cdots,0)^{\mathrm{T}} with the i-th entry nonzero, the system (2.1) can be converted into the following algebraic state space representation
\begin{cases} x(t+1)=L(u(t)\otimes x(t)),\\ y(t)=Hx(t), \qquad (2.2) \\ \end{cases}
where L\in {\cal L}_{k^n\times k^{n+m}}, H\in {\cal L}_{k^p\times k^n} are logical matrices, called the structure matrices.
One sees that the dimension of system (2.2) grows exponentially with the number of the nodes. In what follows we shall reduce it using the observational equivalence.
The main concept in our aggregation approach, the so-called bisimulation, is based on the quotient dynamics of transition systems.
Definition 2.1
Consider a transition system T=(X,U,\Sigma,O,h), where X is the set of states, U is the set of inputs (controls or actions), \Sigma:X\times U \rarr 2^X is a transition mapping, O is the set of observations, h:X\rarr O is the observation mapping.
The tuple T/\sim :=(X/\sim,U,\Sigma_{\sim},O,h_{\sim}) is called the quotient system of T under observational equivalence, where
(i) X/\sim=\{x/\sim\;|\; x\in X\} is the set of (observational) equivalence classes.
(ii) U is the (original) set of inputs.
(iii) \Sigma_{\sim}:X/\sim \times U \rarr 2^{X/\sim}, defined as follows. Suppose X_i,X_j\in X/\sim, then X_j\in \Sigma_{\sim}(X_i,u) if and only if, \exists x_i\in \mathrm{con}(X_i),x_j\in \mathrm{con}(X_j), s.t. x_j\in \Sigma(x_i,u).
(iv) O is the (original) set of observations.
(v) h_{\sim}:X/\sim \rarr O, defined as follows: h_{\sim}(X_i):=h(x_i), x_i\in \mathrm{con}(X_i).
Let x_1\sim x_2 denote the equivalence relation that x_1, x_2 have identical observations. If for any u\in U and x_1'\in \Sigma(x_1,u) there exists x_2'\in \Sigma(x_2,u) such that x_1'\sim x_2', then we say x_1\approx x_2. If for any x_1\sim x_2 we have x_1\approx x_2, then T/\sim is called a bisimulation of T, denoted by T/\approx.
Intuitively, the bisimulation indicates that the input-output relation of one transition system can be fully recovered from that of another system, and vice versa, depicted as in Figure 1.
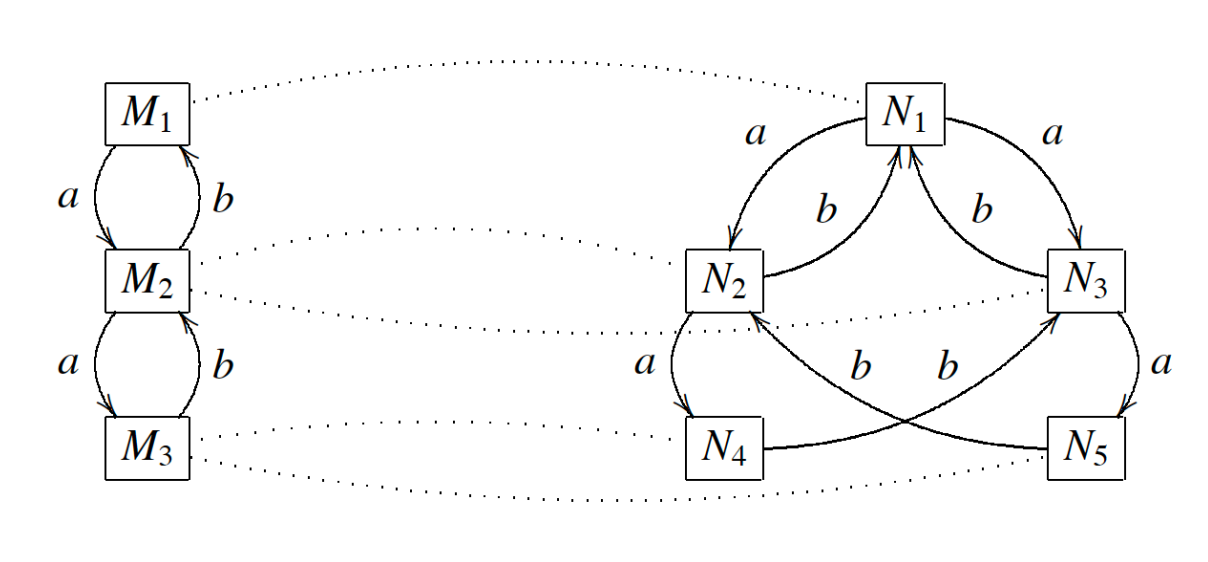
Figure 1. Bisimluation between finite transition systems [5]
3 Main Results
We propose an aggregation algorithm for system (2.1) (correspondingly, (2.2)), based on the observational equivalence and bisimulation relation derived from the equivalence.
Consider a network \Sigma with network graph (N,E), where N=\{x_1,x_2,\cdots,x_n\}.
Let A=\{x_{a_1},\cdots,x_{a_{n_A}}\}\subset N, where \{a_1,a_2,\cdots,a_{n_A}\}\subset [1,n]. Let A^c:=N\backslash A. If (x_i,x_j)\in E, x_i\in A^c, x_j\in A, then x_i is called a formal input of A. If (x_i,x_j)\in E, x_i\in A, x_j\in A^c, then x_i is called a formal output of A.
A is called an aggregatable block if there is no (x_i,x_j)\in E such that x_i is a formal input and x_j is a formal output.
Proposition 3.1
Let A\subset N be an aggregatable block of the network \Sigma. Suppose the dynamics of the transition system \Sigma_A with formal inputs v_1,\cdots,v_{\alpha}\in N\backslash{A} and formal outputs y_1,\cdots,y_{\beta}\in A has structure matrices of dynamics and observation L_A, H_A respectively, then its quotient system under output equivalence with respect to the formal outputs, denoted by \Sigma_A/\sim, is a bisimulation if and only if
H\times_{\cal B} L_A\times_{\cal B} (I_m\otimes H^\mathrm{T})\in{\cal L}_{k^s\times k^s}, \qquad (3.1)
where H is the structure matrix of the function \otimes_{i=1}^rx_i \rarr \otimes_{j=1}^{s}x_{i_j}, and \times_{\cal B} is the Boolean product.
The quotient system has the dynamics as
y(t+1)=\tilde{L}_A(u(t)\otimes v(t)\otimes y(t)), \qquad (3.2)
where \tilde{L}_A=H_A\times_{{\cal B}} L_A\times_{{\cal B}} (I_{k^{m+ \alpha}}\otimes H^{T}_A)\in {\cal B}_{\xi\times \eta}, \xi:=k^{\beta}, \eta:=k^{m+\alpha+\beta}, v:=\otimes_{i=1}^{\alpha}v_i, y:=\otimes_{j=1}^{\beta}y_j, u:=\otimes_{\ell=1}^{m}u_{\ell}. If \Sigma_A/\!\sim=\Sigma_A/\!\approx is a bisimulation, then the aggregation does not affect the dynamics of the overall system.
The above criterion provides a way of deriving the dynamics of aggregatable blocks and replacing the subnetworks with lower-dimensional equivalences.
Finally, when the aggregation does not provide a bisimulation, we propose the following algorithm to transform the aggregatable block into a finite Markov chain of lower dimension.
We propose the following aggregation algorithm:
Data: k-valued network \Sigma with network graph (N,E).
• Step 1: Partition the networks according to the balancing principle (aggregate the states which are neither controllable nor observable), choose A\subset N an aggregatable block with transition dynamics \Sigma_A and structure matrices L_A, H_A.
• Step 2: Aggregate A following the observational equivalence, replacing the Boolean product in (3.1) with conventional product, set M_A:=H_AL_A(I_{k^{m+\alpha}}\otimes H^\mathrm{T}_A), and verify if it is a logical matrix.
• Step 3: Calculate the approximate bisimulation when the aggregated subnetworks are not exact. Suppose M_A=(m_{i,j})\in {\cal M}_{\xi\times \eta}, denote
m_j:=\sum_{i=1}^{\xi}m_{i,j}, j\in [1,\eta]. Construct a Markov chain with the same formal inputs and formal outputs as \Sigma_A/\sim and its dynamics in ASSR is
y(t+1)=M^{i_1,i_2,\cdots,i_{\eta}}(u(t)\otimes v(t)\otimes y(t)),\quad i_j\in [1,\xi],\;j\in [1,\eta],
where each M^{i_1,i_2,\cdots,i_{\eta}} takes the value \delta_{\xi}[i_1,i_2,\cdots,i_{\eta}] with probability p_{i_1,i_2,\cdots,i_{\eta}}=\prod_{j=1}^\eta\frac{m_{i_j,j}}{m_j}.
4 An Example
We consider the T cell receptor kinetics modeled in [4] as an example. The following is taken from [7] with the physical meaning of the nodes omitted.
The dynamics of the network of T cell receptor kinetics with 37 nodes and 3 controls, all of binary values, shown in Figure 2, is described in the following equations, where x_i(*)=f(x_{j_1},\cdots,x_{j_i}) is a shortened expression of x_i(t+1)=f(x_{j_1}(t),\cdots,x_{j_i}(t)), while f_i is a logical function generated from basic operators (conjunction, disjunction, negation), i=1,\cdots,37.
\begin{array}{l} x_1(*)=x_9\wedge x_{18},~x_2(*)=x_{14},~x_3(*)=x_2,~x_4(*)=x_{37},\\ x_5(*)=x_6,~x_6(*)=x_{32},~x_7(*)=x_{25},~x_8(*)=x_{21},\\ x_9(*)=x_8,~x_{10}(*)=(x_{20}\wedge u_2)\vee(x_{35}\wedge u_2),\\ x_{11}(*)=x_{19},~x_{12}(*)=x_{19},~x_{13}(*)=x_{24},~x_{14}(*)=x_{25},\\ x_{15}(*)=x_{34}\wedge x_{37},~x_{16}(*)=\overline{x_{13}}, ~x_{17}(*)=x_{33},\\ x_{18}(*)=x_{17}, ~x_{19}(*)=x_{37},~x_{20}(*)=\overline{x_{26}}\wedge u_1\wedge u_2,\\ x_{21}(*)=x_{28},~x_{22}(*)=x_{3}, ~x_{23}(*)=\overline{x_{16}},~x_{24}(*)=x_{7},\\ x_{25}(*)=(x_{15}\wedge x_{27}\wedge x_{34}\wedge x_{37})\vee(x_{27}\wedge x_{31}\wedge x_{34}\wedge x_{37}),\\ x_{26}(*)=x_{10}\vee\overline{x_{35}},~x_{27}(*)=x_{19},~x_{28}(*)=x_{29},\\ x_{29}(*)=x_{12}\vee x_{14},~x_{30}(*)=x_{7}\wedge x_{13},~x_{31}(*)=x_{20},\\ x_{32}(*)=x_{8},~x_{33}(*)=x_{24},~x_{34}(*)=x_{11},~x_{35}(*)=\overline{x_{4}}\wedge u_3,\\ x_{36}(*)=x_{10}\vee (x_{20}\wedge x_{35}), ~x_{37}(*)=\overline{x_{4}}\wedge x_{20}\wedge x_{36}. \end{array}
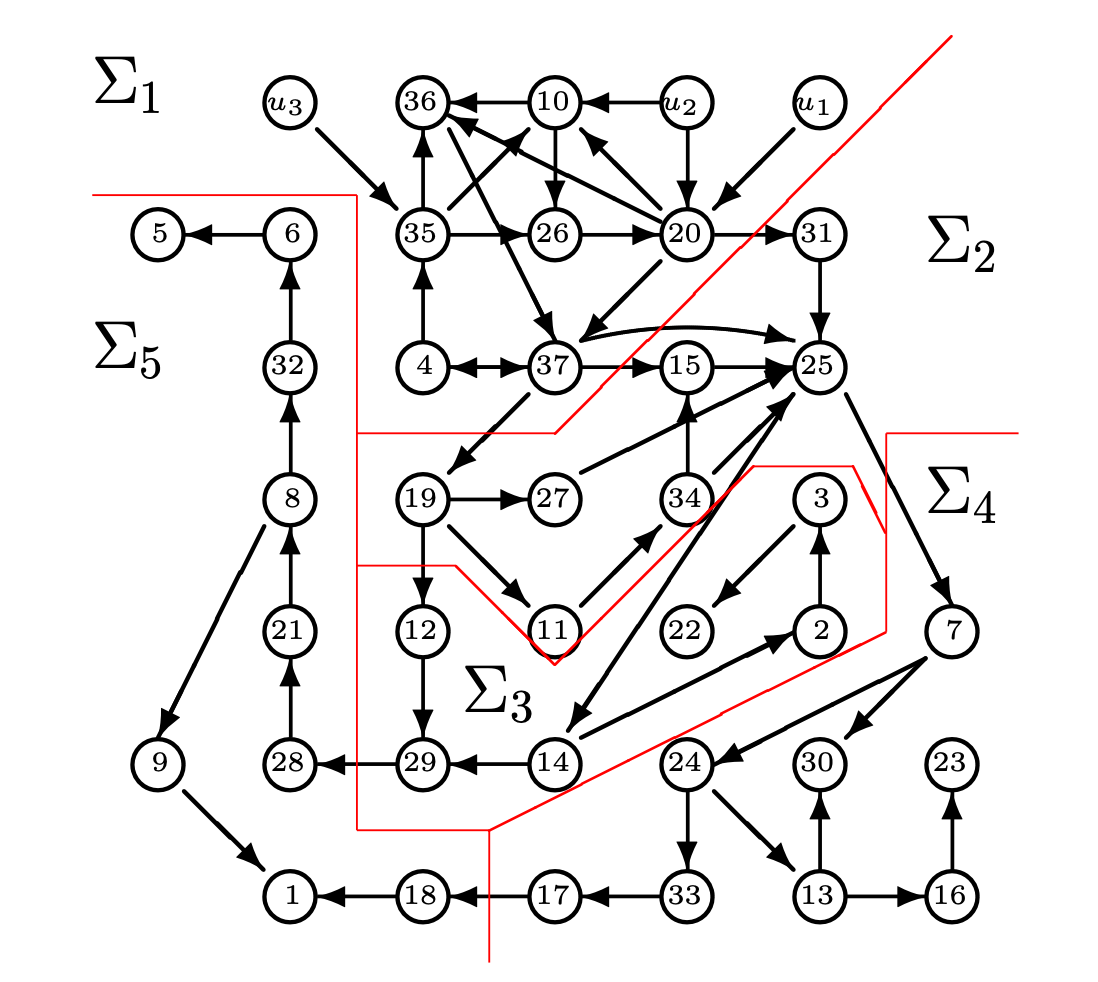
Figure 2. T cell receptor kinetics
It is natural to consider the nodes with zero out-degree as observers. So we have y_1=x_1, y_2=x_5, y_3=x_{22}, y_4=x_{23}, y_5=x_{30}.
Then the network is divided into 5 blocks. We will use simulation to aggregate them.
Each block \Sigma_i is characterized by z^i(t+1)=L_iv^i(t)z^i(t), q^i(t)=H_iz^i(t), i=1, 2, \cdots, 5, where z^i is the algebraic from of the state in the corresponding subnetwork \Sigma_i, and v^i and q^i are the formal inputs and formal outputs of the block, respectively, while H_i, L_i are the structure matrices.
We will use \Sigma_2 as an example to illustrate the approximate aggregation to a block.
Within \Sigma_2, rename the variables as follows: z_1=x_{11}, z_2=x_{15}, z_3=x_{19}, z_4=x_{25}, z_5=x_{27}, z_6=x_{31}, z_7=x_{34}; v_1=x_{20}, v_2=x_{37}; q_1=x_{19}, q_2=x_{25}, where v_1, v_2 are block inputs, q_1, q_2 are block outputs.
Then from the structure matrices of the block dynamics as L_2\in {\cal L}_{128\times 512},
H_2\in {\cal L}_{4\times 128},
Following the aggregation algorithm,
we normalize the matrix H_2L_2(I_4\otimes H_2^\mathrm{T}):=T^2, then
the probabilistic approximation of \Sigma_2 is obtained by updating T^2 with
T^2=\left[ \begin{array}{cccccccccccccccc} \frac{1}{8}&\frac{1}{8}&\frac{1}{8}&\frac{1}{8}&0&0&0&0&\frac{1}{8}&\frac{1}{8}&\frac{1}{8}&\frac{1}{8}&0&0&0&0\\ \frac{7}{8}&\frac{7}{8}&\frac{7}{8}&\frac{7}{8}&0&0&0&0&\frac{7}{8}&\frac{7}{8}&\frac{7}{8}&\frac{7}{8}&0&0&0&0\\ 0& 0& 0& 0&0&0&0&0& 0& 0& 0& 0&0&0&0&0\\ 0& 0& 0& 0&1&1&1&1& 0& 0& 0& 0&1&1&1&1\\ \end{array} \right].
Similarly, the ASSR is obtained for the systems \Sigma_1, \Sigma_3, \Sigma_4 and \Sigma_5. Summarizing these dynamics of blocks, an overall aggregated simulation for T cell is shown in Figure 3, where z^1_1=x_{20}, z^1_2=x_{37}, z^2_1=x_{19}, z^2_2=x_{25}, z^3_1=x_{22}, z^3_2=x_{29}, z^4_1=x_{23}, z^4_2=x_{30}, z^4_3=x_{17}, z^5_1=x_{1}, z^5_2=x_{5}.
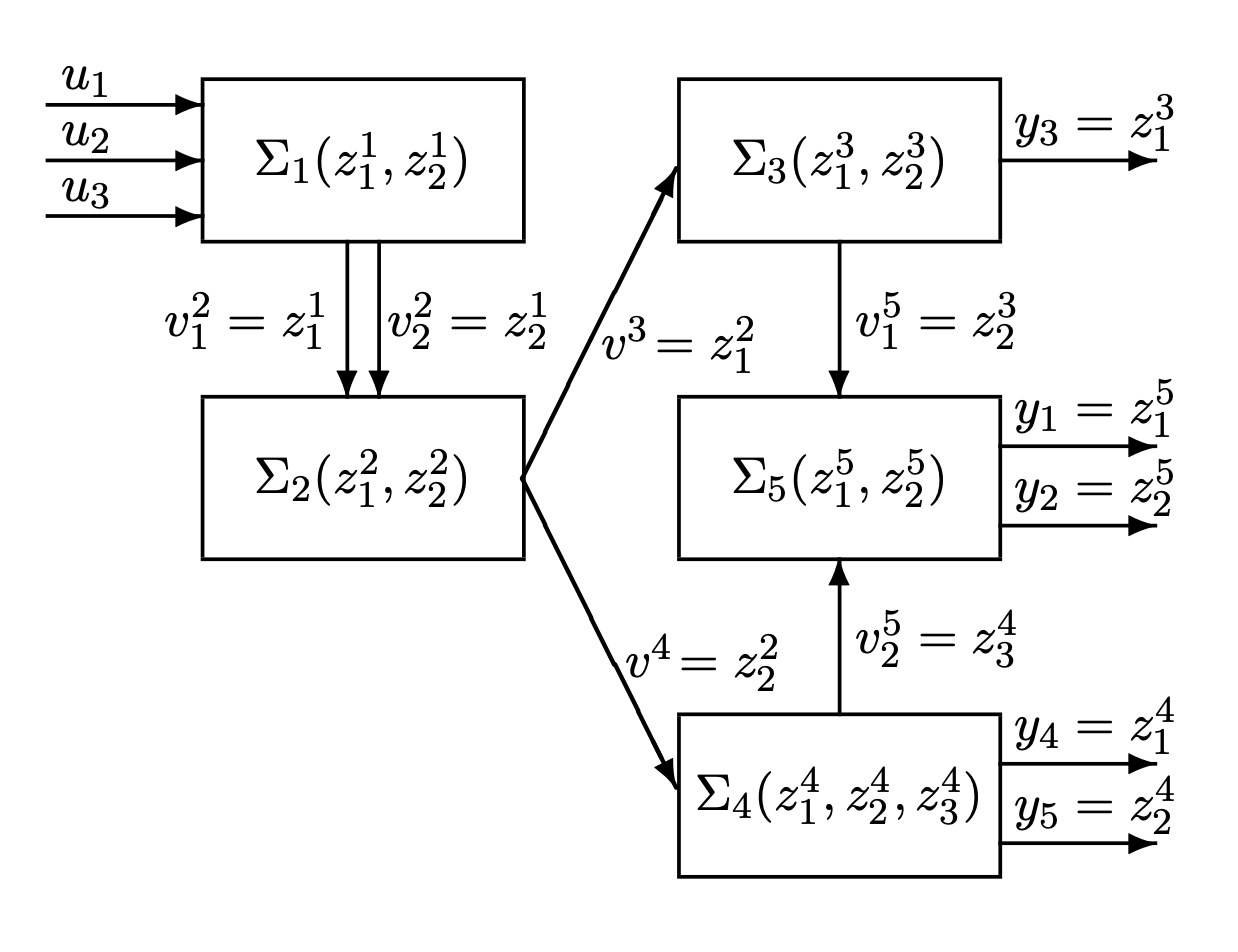
Figure 3. Aggregated bisimulation of T Cell receptor kinetics
This aggregated system has only 11 state nodes and 3 controls, which significantly simplifies the original model. Of course, the transition form of this quotient system can be further simplified by using y_i, i=1,\cdots,5 as new nodes. This is a trade-off between computational complexity and information about the transitions of the inner states.
References
1] C. Carlet, Boolean Function for Cryptography and Correcting Codes, in Boolean Models and Methods in Mathematics, Y. Crama, P. Hammer (eds.), 257-397, Cambridge Univ. Press, Cambridge, 2010.
[2] D. Cheng, H. Qi, Z. Li, Analysis and Control of Boolean Networks – A Semi-tensor Product Approach, Springer, London, 2011.
[3] S. Kauffman, Metabolic stability and epigenesis in randomly constructed genetic nets, J. Theor. Biol., vol. 22, no. 3, pp. 437-467, 1969.
[4] S. Klamt, J. Saez-Rodriguez, J. A. Lindquist, L. Simeomi, E. D. Gilles, A methodology for the structural and functional analysis of signaling and regulatory networks, BMC Bioinform., vol. 7, no. 1, No. 56, 2006.
[5] D. Sangiorgi, Introduction to bisimulation and coinduction, Cambridge University Press, 2011.
[6] Y. Yan, D. Cheng, J. Feng, J. Yue, Survey on applications of algebraic state space theory of logical systems to finite state machines, Sci. China Inf. Sci., vol. 66, 111201, 2023.
[7] S. Zhu, J. Liu, J. Zhong, Y. Liu, J. Cao, Sensors design for large-scale Boolean networks vispinning observability, IEEE Trans. Autom. Control, vol. 67, no. 8, pp. 4162-4169, 2022.
|| Go to the Math & Research main page
You might like!


{kind=link}