
Exact Controllability of Stochastic First-Order Multi-Dimensional Hyperbolic Systems
 Yu Wang
Yu WangIn the real world, the evolution of many physical quantities can be described by first-order hyperbolic systems. Notable examples include the Saint-Venant equations for open channels, the Aw-Rascle model for road traffic, gas dynamics, and shallow water equations. Over the past few decades, the boundary control theory for deterministic first-order hyperbolic systems has seen significant advancements.
However, in practical scenarios, systems are often subjected to non-negligible random disturbances (such as uncertainties in driver behavior or random fluctuations in wind stress). This reality prompts us to model these dynamics as stochastic first-order hyperbolic systems. Today, we will explore a cutting-edge problem in mathematical control theory: For a multi-dimensional symmetric hyperbolic system perturbed by white noise, can we steer it to any desired target state within a finite time using appropriate control interventions?
Our work takes you on a deep dive into this intriguing question.
1 Mathematical Model
Let T > 0 be a given control time horizon, and G \subset \mathbb{R}^n be a bounded domain with a smooth boundary \Gamma. We consider a controlled stochastic first-order multi-dimensional symmetric hyperbolic system of the following form:
\begin{cases} dy + \sum\limits_{i=1}^{n} A_i(x) y_{x_i}\, dt = B_1 y \, dt + (B_2 y + v)\, dW(t) & \text{in } (0,T) \times G,\\[4pt] \zeta_{-} = u & \text{on } (0,T) \times \Gamma,\\[2pt] y(0) = y_0 & \text{in } G. \end{cases}
In this system:
• y(t,x) \in \mathbb{R}^N is the system state we aim to control.
• A_i(x) are N \times N symmetric matrices that constitute the principal part of the hyperbolic system (characterizing the speed and direction of wave propagation).
• W(t) is a standard one-dimensional Brownian motion, representing the random noise acting on the system.
• \zeta_{-} represents the incoming variable of the system at the boundary.
What are our control inputs?
Here, we introduce two control variables:
• Boundary control. u(t,x): Acting on the incoming boundary of the system.
• Internal control. v(t,x): Acting on the diffusion term (the dW(t) term) throughout the domain.
Our goal is to investigate the Exact Controllability of this system: For any initial state y_0 and any terminal target y_1 (which can be an \mathcal{F}_T-measurable random variable since the system is stochastic), does there exist a control pair (u, v) such that the system almost surely reaches the target at time T, i.e., \mathbb{P}(y(T) = y_1) = 1?
2 Geometric Condition
For a system to be controllable, information (or energy) must be able to propagate to the boundary within a finite time so that it can be captured or manipulated by the boundary control u. For multi-dimensional systems, we must impose a structural assumption on the coefficient matrices A_i(x):
Condition 1.
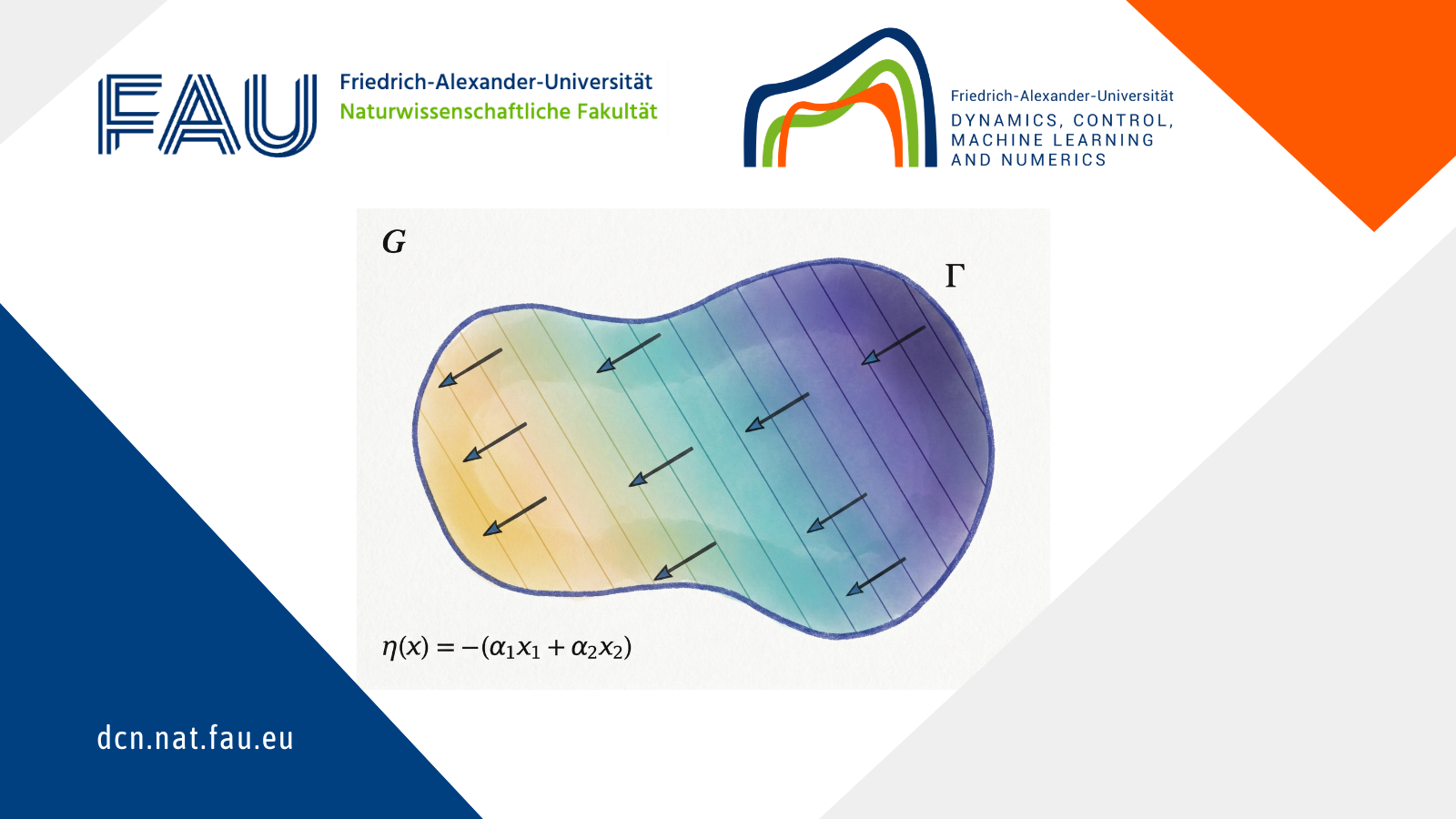
There exists a function \eta(\cdot) \in C^{1}(\overline{G}) and a constant c_{0} > 0 such that for any x \in \overline{G} and \gamma \in \mathbb{R}^N:
- \Big\langle \Big(\sum_{i=1}^{n} A_{i}(x) \eta_{x_{i}}(x) \Big) \gamma , \gamma \Big \rangle \ge c_{0} |\gamma|^2.
What does this condition mean geometrically?
If we examine the bicharacteristics of the hyperbolic system’s principal part (which represent the propagation trajectories \mathbf{x}_k(s) of energy in physical space), the above condition is equivalent to the existence of a potential function \eta(x) such that all characteristic rays propagate along the \textbf{strict descent direction} of \eta:
\frac{d}{ds} \eta(\mathbf{x}_k(s)) \leq -c_0.
This implies that all rays will eventually be “forced” to escape the domain G within a finite time. The maximum time required for the slowest ray to traverse the entire domain can be estimated by the range of \eta:
T_0 = \frac{1}{c_0}\Big(\max_{x \in \overline{G}} \eta(x) - \min_{x \in \overline{G}} \eta(x)\Big).
As long as the given time T > T_0, all internal information has sufficient time to propagate to the boundary, allowing the boundary control to take effect. This condition naturally holds in scenarios such as \textbf{stochastic fluid systems in a supersonic regime} or \textbf{free, uncongested stochastic traffic flow models}.
3 Core Theorem: Exact Controllability
Based on the aforementioned geometric characteristics, the paper establishes a positive conclusion:
Theorem 1 (Exact Controllability)
Assume Condition 1 holds. If the control time T satisfies T > T_{0}, then the stochastic first-order multi-dimensional hyperbolic system is exactly controllable at time T.
Why do we need such complex “Dual Controls”?
You might ask: Why must we use both a boundary control u and a global internal control v? Could we rely solely on boundary control, or restrict the internal control to a small subregion of the domain?
Addressing this, the study provides three thought-provoking \textbf{Negative Results}:
• Boundary control is indispensable: If we remove the boundary control (relying solely on internal control v ) and assume B_1 is deterministic, the stochastic system is \textbf{uncontrollable}.
• Internal control must be global: If the internal control v is restricted to a proper subdomain G_0 \subsetneq G, the system remains \textbf{uncontrollable}, even with boundary control.
• Control must enter the diffusion term: If the internal control only acts on the drift term (dt), but cannot intervene in the diffusion term (dW(t)), the system is again \textbf{uncontrollable}.
4 Proof Idea: The Duality of Control and Observation
Mathematically, controlling a forward stochastic equation is equivalent to proving that its corresponding \textbf{Backward Stochastic Partial Differential Equation (BSPDE)} possesses a certain “Observability”.
We introduce the backward adjoint system:
\begin{cases} dz + \sum\limits_{i=1}^n A_i z_{x_i} dt = -\Big[ \Big( B_1^{\top} + \sum\limits_{i=1}^n\! A_{i,x_i} \Big) z\! +\! B_2^{\top} Z \Big] dt + Z dW(t) & \text{in } (0,T) \times G, \\[2pt] \xi_+ = 0 & \text{on } (0,T) \times \Gamma, \\[2pt] z(T) = z_T & \text{in } G, \end{cases}
where \xi_{+} is the outgoing variable of the backward system.
Here, z is the adjoint state, and Z is an auxiliary process introduced to guarantee the adaptedness of the solution.
The exact controllability of the original system is equivalent to the following \textbf{Observability Inequality}:
\|z(0)\|_{L^2(G)}^2 \leq C \bigg( \mathbb{E}\int_0^T \int_\Gamma |\xi_{-}|^2 d\Gamma dt + \mathbb{E}\int_0^T \int_G |Z|^2 dx dt \bigg).
The physical intuition behind this inequality is that we can uniquely determine and control the system’s energy at the initial moment (the terminal state of the backward equation) by measuring the outflowing information at the boundary (\xi_-) and the implicit information of the noise (Z).
The Breakthrough Tool: Global Carleman Estimate
How do we prove this inequality? We developed a \textbf{Global Carleman Estimate} specifically tailored for multi-dimensional first-order stochastic systems.
The core idea is to construct an exponential weight function \theta = e^{\lambda(\beta t + \eta(x))} with a large parameter \lambda, and set w = \theta z. By applying It\^o’s formula to the weighted process and integrating by parts over the domain, the critical step relies on the geometric properties of \eta(x) from Condition 1 to generate a dominant negative-definite term:
- 2\lambda^{2} \mathbb{E} \int_{0}^{T} \int_{G} \theta^{2} \Big\langle z,\; \Big( \sum_{i=1}^{n} A_{i}\eta_{x_{i}} + \beta \Big) z\Big\rangle dx dt \ge 2(c_{0}-\beta)\lambda^{2} \mathbb{E}\int_{0}^{T}\int_{G} \theta^{2} |z|^{2} dx dt.
By carefully choosing \beta \lt c_0, this term scaled by \lambda^2 becomes powerful enough to “absorb” all lower-order error terms. Finally, combining this with the energy conservation properties of the backward equation and Gronwall’s inequality yields the required observability inequality, thereby completing the proof of exact controllability.
5 Conclusion
Extending the control theory of deterministic partial differential equations (PDEs) to stochastic systems (SPDEs) is a highly challenging endeavor. This article demonstrates a remarkable result: multidimensional random fluctuations increase the difficulty of control, necessitating a global internal control acting on the diffusion term. Nevertheless, we can still fully control this complex stochastic process in a finite time. The key requirement is that the convective characteristics (geometric rays) must smoothly guide energy to the boundary.
|| Go to the Math & Research main page




{kind=link}
{kind=link}
{kind=link}