

 Maicon Sônego
Maicon Sônego
Introduction
The Lotka-Volterra model reflects real ecological interactions where species compete for limited resources, potentially leading to coexistence, dominance of one species, or extinction of another. Comprehending the mechanisms governing these systems can yield critical insights for developing strategies in ecological management and biodiversity conservation.
In this post, we study the controllability of a Lotka-Volterra system with weak competition between two species, using constrained controls on the domain boundary. We establish conditions for finite-time controllability towards coexistence and asymptotic controllability towards single-species states or extinction. Additionally, we identify cases where controllability fails and construct barrier solutions. Numerical experiments support our theoretical results.
Mathematical Model
Our problem is described below
\left\{\begin{array}{ll} u_t=d_1u_{xx}+u(1-u-k_1v),& (x,t)\in (0,L)\times\mathbb{R}^+\\ v_t=d_2v_{xx}+v(a-v-k_2u),& (x,t)\in (0,L)\times\mathbb{R}^+\\ u(x,0)=u_0(x),\ \ v(x,0)=v_0(x),& x\in (0,L) \end{array}\right. (1)
where
• u and v are the population densities of the two species competing in (0,L) and (u(x,t),v(x,t)) is the state to be controlled;
• u_0\in L^{\infty}((0,L);[0,1]) and v_0\in L^{\infty}((0,L);[0,a]) are the initial conditions;
• d_1,d_2>0 are constants representing the diffusion rates;
• a>0 is a constant representing the intrinsic growth rate of v;
• k_1,k_2>0 are constants representing the inter-specific competition between u and v.
The intrinsic growth rate of u , as well as the intraspecific competition rates, were set to 1 in order to reduce the number of free variables in the model and thus facilitate its analysis. On the other hand, (1) can be regarded as a suitably renormalized version of a general Lotka-Volterra model.
Note that 1 and a are the carrying capacities of u and v, respectively, and therefore it is natural to constrain the solutions by these values, i.e.
0\leq u(x,t)\leq 1 \text{ and } 0\leq v(x,t)\leq a \text{ for all } (x,t)\in (0,L)\times\mathbb{R}^+. (2)
Moreover, we assume
k_1,k_2\lt1
and this condition results in a weak competition system.
We suppose boundary controls constraints c_u(x,t), c_v(x,t)\in L^{\infty}(\{0,L\}\times\mathbb{R}^+),
\left\{\begin{array}{ll} u(x,t)=c_u(x,t)& (x,t)\in\{0,L\}\times\mathbb{R}^+\\ v(x,t)=c_v(x,t)& (x,t)\in\{0,L\}\times\mathbb{R}^+\\ \end{array}\right. (3)
satisfying
0\leq c_u\leq 1 \text{ and }0\leq c_v\leq a. (4)
We are interested in controlling system (1) towards the steady-states of (1), that is, solutions of
\left\{\begin{array}{ll} d_1u_{xx}+u(1-u-k_1v)=0,& x\in (0,L)\\ d_2v_{xx}+v(a-v-k_2u)=0,& x\in (0,L).\\ \end{array}\right. (5)
The targets to be considered in this work are described below.
• a homogeneous state of species coexistence
(u^*,v^*)=\left(\dfrac{1-k_1a}{1-k_1k_2},\dfrac{a-k_2}{1-k_1k_2}\right), (6)
which only makes sense to us when k_2 \lt a \lt 1/k_1;
• the extinction of the species (0,0);
• the survival of one of the species (1,0) and (0,a);
• a heterogeneous state of species coexistence for the case d_1=d_2=d and a=1,
(u^{**}(x),v^{**}(x))=\left(\left(\dfrac{1-k_1}{1-k_1k_2}\right)\theta(x),\left(\dfrac{1-k_2}{1-k_1k_2}\right)\theta(x)\right) (7)
where \theta(x) is a smooth function that satisfies
\left\{\begin{array}{l} d\theta''(x)+\theta(x)(1- \theta(x))=0\ \ x\in (0,L) \\ \theta(0)=\theta(L)=0,\\ 0 \lt \theta(x) \lt 1,\ \ x\in (0,L). \end{array}\right. (8)
Main Results
Theorem 1
If
k_2 \lt a \lt \dfrac{1}{k_1} (9)
then (1) is controllable towards (u^*,v^*) defined in (6).
Controllability towards the target (u^*, v^*), independent of the domain size L or other parameter values, highlights the decisive role of species competition in relation to diffusion capacities and the environment’s size. Even if one of the species has a higher diffusion capacity in a large competition region, given that this competition is weak, it is possible to control the boundary of this environment in order to achieve a coexistence state of the species.
Theorem 2
(i) If L\leq \displaystyle\sqrt{\frac{d_2}{a}}\pi or
k_2>a then (1) is controllable towards (1,0).
(ii) If L\leq \sqrt{d_1}\pi or
k_1>\dfrac{1}{a} then (1) is controllable towards (0,a).
This theorem illustrates the complex balance between diffusion, competition, and domain size in determining species dominance. Specifically, the conditions indicate how the length of L, the diffusion rate, and the competition intensity influence the possibility to steer the system towards states (1,0) or (0,a). In both cases ((i) and (ii)), for fixed diffusion, reproduction, and competition parameters, it is always possible to control the system towards these single-species state if L is sufficiently small. In these cases, static controls are sufficient.
On the other hand, if the competition and reproduction rates are related such that k_2 > a or k_1 > 1/a (and consequently we do not have a coexistence state), then it is possible to control the system towards (1,0) or (0,a), respectively, regardless of the size of L.
Theorem 3
If k_2 \lt a \lt 1/k_1 and
L>\max\left\{\sqrt{\dfrac{d_1}{1-ak_1}}\pi,\sqrt{\dfrac{d_2}{a-k_2}}\pi\right\} (10)
then (1) is not controllable towards either (1,0) or (0,a).
Theorem 4
(i) If
L\leq \min\left\{\sqrt{d_1}\pi,\sqrt{\frac{d_2}{a}}\pi\right\}
then the system (1) is controllable towards (0,0);
(ii) if
a \lt \dfrac{1}{k_1} \text{ and } L>\sqrt{\dfrac{d_1}{1-ak_1}}\pi
or
a>k_2 \text{ and } L>\sqrt{\dfrac{d_2}{a-k_2}}\pi,
then the system (1) is not controllable towards (0,0).
Theorem 5
If a=1, d_1=d_2=d>0 and L> \sqrt{d}\pi,
then (1) is controllable towards an specific heterogeneous coexistence state (u^{**},v^{**}) defined in (7).
A simple biological interpretation of the result above is that for species with the same reproduction characteristics and diffusion capacity, if the interaction between them has a small effect, and if the length of L is sufficiently large, then a coexistence state assuming values zero at the boundary will exist and be unique and hence stable. In this controlled situation, neither species can drive the other to extinction regardless of the initial state taken.
Ideas of the Proofs
The proofs of the above theorems include different strategies, for instance: we use solutions of the corresponding Neumann problem as control inputs, comparison principles, energy estimates and for non-controllability results, we construct explicit barrier solutions that obstruct the trajectories. All details can be found in [1].
Controllability in finite time
In this section our goal is to reach the target (u^*,v^*) in finite time with controls satisfying the constraints (4).
Here, the strategy is to start with the controls used in Theorem 1 and then, when the trajectory is sufficiently close to (u^*,v^*), we use the control derived from a well-known result of exact local controllability, which we state below.
Theorem 6
Let T>0 fixed. Then there exist constants C(T) and \delta(T) such that, for all targets (\overline{u},\overline{v}) steady states of (1) and for each initial data (u_0,v_0) (0\leq u_0\leq 1, 0\leq v_0\leq a) in L^{\infty}(0,L) with
||(u_0,v_0)-(\overline{u},\overline{v})||_{L^{\infty}}\leq\delta
we can find a control (c_u,c_v)\in L^{\infty}(\{0,L\}\times (0,T))\times L^{\infty}(\{0,L\}\times (0,T)) such that the solution (u,v) of (1) starting at (u_0,v_0) with control (c_u,c_v) satisfies
(u(\cdot,T),v(\cdot,T))=(\overline{u},\overline{v}).
Furthermore,
\max\{|c_u(x,t)-\overline{u}(x)|,\ |c_v(x,t)-\overline{v}(x)|;\ (x,t)\in\{0,L\}\times (0,T)\}\leq C ||(u_0,v_0)-(\overline{u},\overline{v})||_{L^{\infty}}.
Theorem above is an adaptation of Lemma 2.1 from [2] to our case.
Theorem 7
If
k_2 \lt a \lt \dfrac{1}{k_1} (12)
then (1) is controllable in finite time towards (u^*,v^*) defined in (6).
Remark 8
We note that the controls (c_u,c_v) provided by Theorem 6 do not necessarily lie in [0,1]\times [0,a]. The values of c_u and c_v oscillate in a neighborhood of the desired target over time, therefore, the only possible target that can be reached in finite time using this result is (u^*,v^*), which lies between the bounds established by (4).
Numerical Simulations
To illustrate our results, we include several numerical simulations. Our main objectives are:
• to compare the control strategies obtained with a computationally derived optimal control strategy, and
• to visualize the action of barrier solutions inhibiting control for specific targets.
The simulations were performed using the Mathematica software and the Casadi package in MATLAB.
4.1 Controllability towards the survival of one of the species.
The simulations in this case will be performed only for the target (1,0). Everything could be analogously done for the target (0,a).
Theorem 2 provides us with two distinct conditions for controllability towards (1,0), each with a different strategy. In what follows, we simulate both strategies and also compare them with the optimal control obtained computationally.
The non-controllability results for (1,0) and (0,a) presented in Theorem 3 can also be simulated. The existence and visualization of the barrier solution allow us to interpret this phenomenon, which prevents the solutions from reaching these targets as long as the initial conditions are appropriately chosen. However, this analysis is similar to the one conducted for non-controllability towards (0,0) (Subsection 4.2), so we will omit it here.
In the Figure 1, we simulate the behavior of the solutions assuming the condition a \lt k_2, more precisely: d_1=d_2=0.01, k_1=0.8, k_2=0.7, a=0.6, L=1 for t\in \{1,2,10,30\}. The controls are derived from the associated Neumann problem, and their behaviors also can be seen in the Figure 1.

Figure 1. Controls c_u (green line) and c_v (orange line) approach 1 and 0, respectively, for x\in\{0,L\} (left). Solutions u (blue line) and v (red line) approach 1 (dashed blue line) and 0 (dashed red line), respectively (right).
In the Figure 2, we simulate the case L \lt \sqrt{d_2/a}\pi (d_1=0.01, d_2=3 k_1=0.8, k_2=0.7, a=0.6, and L=1) with constant controls c_u=1, c_v=0 and t\in\{0.005,0.05,2,4\}. We observe that convergence to the target is faster compared to the previous case, especially for the species v. In both scenarios, we assume initial conditions (u_0,v_0)=(0.2,0.5).
Figure 3 shows the behavior of the solutions under the optimal control obtained for the target (1,0) for t\in\{0.5,2,4,10\} and the behavior of this optimal control.
The optimal control obtained above was achieved assuming L > \sqrt{d_2/a}\pi . A similar behavior, not shown here, occurs when we assume a \lt k_2 .
4.2 Barrier solutions that prevent the extinction of one or both species
In this subsection, we will simulate the case of species extinction. Simulations similar to the previous ones can be conducted for the controllability results we have in Theorem 4 (i). However, we will dedicate this subsection to simulations related to non-controllability, specifically the existence of barrier solutions (Theorem 4 (ii)).

Figure 2. Solutions u (blue line) and v (red line) approach 1 (dashed blue line) and 0 (dashed red line), respectively (case L \lt \sqrt{d_2/a}\pi and controls c_u=1 and c_v=0).

Figure 3. Solutions u (thin lines) and v (thin dashed lines) approach the target (1,0) within the time intervals
t\in\{0.5,2,4,18\} (right), under the optimal controls c_u (green line) and c_v (orange line) (left).
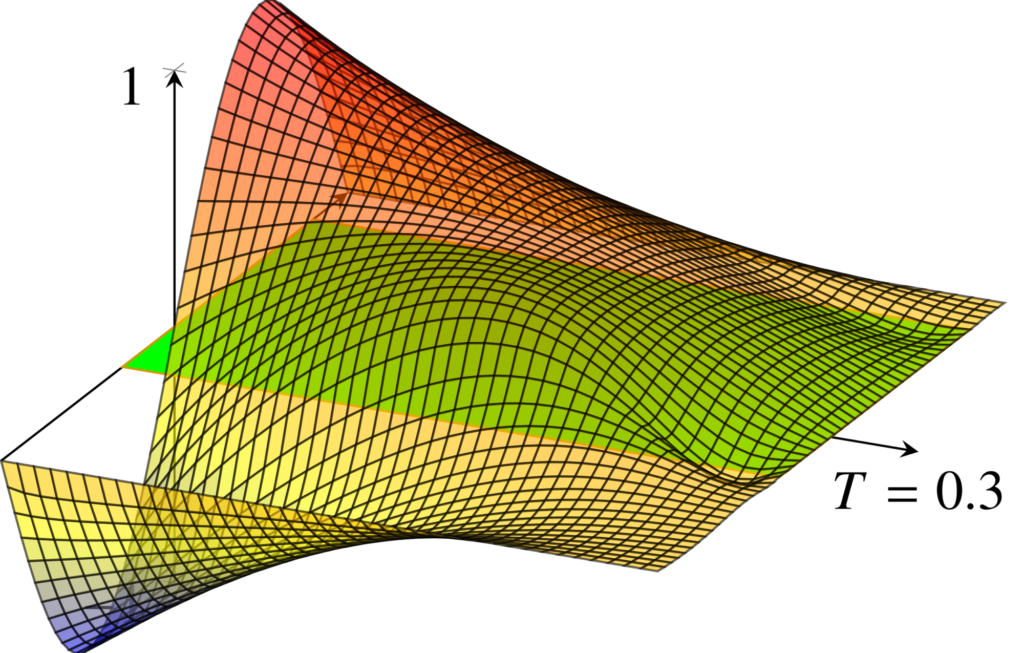
First, let us assume a \lt \dfrac{1}{k_1} and L>\sqrt{\dfrac{d_1}{1-ak_1}}\pi, and then we will have the formation of a barrier solution that prevents u from approaching 0. Figure 4 was generated with the parameters: k_1=0.8, k_2=0.7, a=1, d_1=0.01, d_2=4, and L=1.

Figure 4. Solutions u (blue line), v (red line) and the barrier solution (dashed black line) (case \sqrt{d_1/(1-ak_1)}\pi \lt L \lt \sqrt{d_2/(a-k_2)}\pi).
Note that, in this simulated case, the barrier solution only prevents the extinction of species u with the adopted initial condition, namely: (u_0,v_0)=(0.8, 0.5) (u_0=0.8 is greater than the barrier solution). This occurs because we simulated \sqrt{d_1/(1-ak_1)}\pi \lt L \lt \sqrt{d_2/(a-k_2)}\pi.
In this case, we used the control (c_u,c_v)\equiv (0,0); however, the same phenomenon can be observed for any admissible control adopted. In other words, we can say that under these conditions, it is not possible to interfere with the populations on the boundary of the domain in such a way that leads species u to extinction.
Obviously, one can construct a barrier solution only for species v, assuming
\sqrt{d_1/(1-ak_1)}\pi>L>\sqrt{d_2/(a-k_2)}\pi,
just as it is possible to construct barrier solutions simultaneously for u and v by assuming
L>\max\{\sqrt{d_1/(1-ak_1)}\pi,\sqrt{d_2/(a-k_2)}\pi\}.

Figure 5. Solutions u (blue line), v (red line) and the barrier solutions to u and v (dashed black line and dashed gray line, respectively).
In this case, with appropriate initial conditions taken, neither of the species will go extinct.
In the above simulation, the adopted initial condition was (u_0,v_0)=(0.3, 0.5).
Conclusion
In this study, we have demonstrated how boundary control within an environment can be a significant factor in ecological management. We proved that, in the weak competition scenario considered, it is possible to steer solutions towards various proposed targets. The weak competition between species intuitively leads us to expect a viable situation of coexistence among them. In fact, the necessary condition for a homogeneous coexistence state (see (6)) is sufficient to control the system; this is what we proved in Theorem 1.
We also found that it is possible to drive solutions towards states of a single species or even total extinction, provided the environment is sufficiently small or the parameters satisfy certain conditions (see Theorem 2 and Theorem 4 (i)).
Furthermore, it is important to highlight the controllability towards a heterogeneous coexistence species (u^{**},v^{**}) (Theorem 5). Assuming the same reproduction rates and diffusion capacities for u and v, the weak competition between the species in a sufficiently large domain, allows controllability to this target. As we have seen, this result is a consequence of the global stability of the system with zero Dirichlet boundary conditions.
Conversely, when controllability is not achievable, we have shown explicitly the existence of barrier functions that prevent trajectories from approaching certain targets. These results can be found in Theorems 3 and 4 (ii).
Controllability in finite time towards (u^*,v^*) is always possible when this steady state exists. In fact, this is the content of Section 4. This is achieved using constrains controls and is only possible because the target (u^*,v^*) has its components satisfying 0 \lt u^* \lt 1 and 0 \lt v^* \lt a.
Finally, we highlight the possibility of extension of the results to higher-dimensional domains, as well as the various numerical simulations conducted that support the obtained results.
For further details, refer to our full article [1].
References
[1] M. Sonego, E. Zuazua (2025) Control of a Lotka-Volterra system with weak competition, https://doi.org/10.48550/arXiv.2409.20279[2] D. Pighin, E. Zuazua (2018) Controllability under positivity constraints of semilinear heat equations. Mathematical Control and Related Fields, Vol. 8, No. 3 & 4, pp. 935-964.

{kind=link}
{kind=link}
{kind=link}